The Ultimate GED Math Course [Updated for 2026]
![The Ultimate GED Math Course [Updated for 2026]](https://www.effortlessmath.com/wp-content/uploads/2020/02/The-Ultimate-GED-Math-Course-512x240.jpg)
Free GED Math Solver Library
31 interactive, step-by-step solvers — pick one and use it right here.
Open the Solver Library →A clearer path through every GED Math topic
Welcome to the complete free GED Math course. Use this page as a guided study hub: start with the test overview, move through the topic-by-topic lessons, then finish each weak area with worksheets and practice tests.
The course is organized for students who want less searching and more studying. Every lesson link below opens a focused explanation with worked examples, printable practice, and follow-up questions.
Suggested path: read the GED test overview first, study one topic family at a time, and use the worksheet generator after each lesson to turn weak spots into targeted practice.
Take the timed GED Math practice test here
This course now opens the same interactive practice test used on the GED Math hub. Students can take the timed 46-question exam simulation in a popup, get an instant score, and stay on this course page when they close it.
After the score report, come back to the course sections below and review every topic that showed up as a weak area.
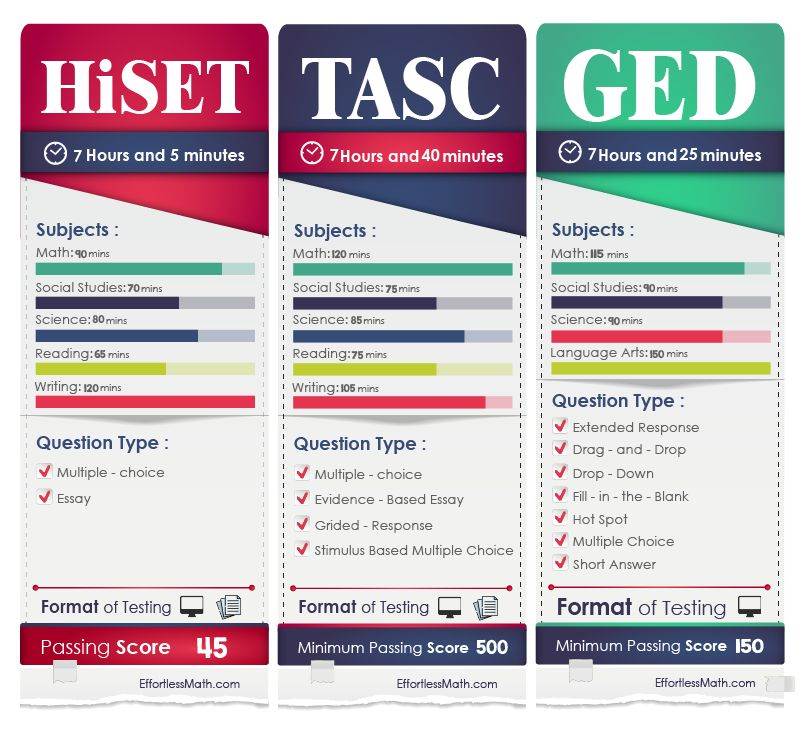
High School Equivalency Tests
Looking for the best resource to help you succeed on the GED Math test?
The Best Book to Ace the GED Math Test
GED Math Test Prep Resources
Before you dive into the topic-by-topic lessons, get the lay of the land. These guides cover what’s on the test, how it’s scored, what to bring with you, and how to put together a study plan that actually fits your life.
Understanding the GED Math Test
- GED Test: Everything You Need to Know
- Overview of the GED Mathematical Reasoning Test
- GED Math Question Types
- How Is the GED Math Test Scored?
- Math Skills You Need for the GED Math Test
Building Your GED Math Study Plan
- How to Prepare for the GED Math Test: Step-by-Step Guide
- How to Create a GED Math Study Plan
- GED Math Test-Taking Strategies
GED Math Formulas, Calculator, and Cheat Sheets
Free GED Math Practice Tests and Worksheets
- Full-Length GED Math Practice Test
- Free GED Math Practice Test
- Free Sample GED Math Practice Questions
- GED Math Practice Test Questions
- Free GED Math Worksheets
Best GED Math Prep Books and Study Guides
GED Math Complete Course
This is the heart of the course. Each section below is a topic family the GED test loves to ask about. Click any link to open a focused lesson with worked examples and free practice. Don’t try to power through everything in one sitting — work one section at a time and check your understanding with the practice problems before moving on.
Number Sense and Integers
- Opposite Integers
- Using Number Lines to Represent Integers
- Vertical and Horizontal Number Lines
- Adding and Subtracting Integers
- Multiplying and Dividing Integers
- Order of Operations
- Classifying Rational Numbers with a Venn Diagram
Fractions, Decimals, and Mixed Numbers
- Simplifying Fractions
- Word Problems: Fractions
- Word Problems Involving Fractions of a Group
- Repeating Decimals
- Convert Between Fractions and Decimals
- Convert Between Decimals and Mixed Numbers
- Improper Fractions and Mixed Numbers
- Order of Decimals, Mixed Numbers, and Fractions
- Multiplying Mixed Numbers
- Dividing Mixed Numbers
- Multiplying and Dividing Decimals
Rational Numbers and Absolute Value
- Number Lines and Rational Numbers
- Comparing and Ordering Rational Numbers
- Word Problems: Comparing and Ordering Rational Numbers
- Converting Rational Numbers to Fractions
- Absolute Value Definition
- Integers and Absolute Value
- Absolute Value of Rational Numbers
- Word Problems with Absolute Value
Ratios and Proportions
- Writing a Ratio
- Ratio Tables
- Writing a Ratio as a Fraction
- Word Problems: Writing a Ratio
- Finding Equivalent Ratios
- Word Problems: Comparing Ratios
- Word Problems: Equivalent Ratios
- Similarity and Ratios
- Equivalent Rates
- Word Problems: Rates and Ratios
Percentages
- Representing Percentages
- Decimals, Grid Models, and Fractions as Percent
- Solving Percentage Problems with Grid Models
- Word Problems: Percentage of a Number
- Solving Percentage Word Problems
- Fractional and Decimal Percentages
- Word Problems: Comparing Percent and Fractions
- Converting Between Percent, Fractions, and Decimals
- Percent Problems
- Simple Interest Problems
Powers, Exponents, and Roots
- Using Exponents to Write Multiplication
- Using Exponents to Write Powers of Ten
- Prime Factorization with Exponents
- Integers Raised to Rational Exponents
Algebraic Expressions
- Identifying Expressions and Equations
- Identifying Equivalent Expressions
- Using Properties to Write Equivalent Expressions
- Algebra Tiles and Equivalent Expressions
- Identifying Errors in Order of Operations
- Factoring Variable Expressions with Area Models
- Distributive Property: Factoring Variable Expressions
- Distributive Property: Factoring Numerical Expressions
- Multiplying Rational Expressions
- Adding and Subtracting Rational Expressions
Equations
- Algebra Tiles for Modeling Equations
- Diagrams for Modeling and Solving Equations
- Evaluating One-Variable Expressions
- Evaluating Two-Variable Expressions
- One-Step Equations
- Word Problems with One-Step Equations
- Multi-Step Equations
- Radical Equations
- Two-Variable Equations from Tables
- Rearranging a Multi-Variable Equation
- Writing a Quadratic Function
Inequalities
- Writing Inequalities from Number Lines
- Graphing Single-Variable Inequalities
- One-Step Inequalities
- Word Problems: One-Step Inequalities
- Inequalities with Absolute Value
- Linear Equation and Inequality Word Problems
Functions and the Coordinate Plane
- Objects on a Coordinate Plane
- Understanding Quadrants
- Coordinate Planes as Maps
- Independent and Dependent Variables
- Graphing Two-Variable Equations
Geometry: Lines, Angles, and Triangles
- Triangles
- Triangle Inequality
- Sides and Angles of a Triangle
- Area of a Triangle
- Polygons
- Area of a Parallelogram
- Area of a Trapezoid
- Area of Compound Figures
- Word Problems: Area of Quadrilaterals and Triangles
Geometry: Solid Figures and Volume
Measurement and Unit Conversions
- Mixed Customary Units
- Customary Unit Conversions
- Converting Traditional and Metric Units
- Comparing Temperatures Above and Below Zero
Statistics, Data Analysis, and Probability
- Mean, Median, Mode, and Range
- Mean, Median, Mode, and Range from Charts
- Identifying Outliers
- Range, Quartiles, and Interquartile Range
- Pie Graphs
- Line Plots
- Distributions in Line Plots
- Frequency Distribution Tables
- Frequency Charts and Trends
- Interpreting Categorical Data
- Identifying Statistical Questions
- Finding the Probability of an Event
Word Problems and Real-World Math
- Word Problems with Two-Variable Equations
- Linear Equation and Inequality Word Problems
- Simple Interest
- Unit Prices with Decimals and Fractions
- Real-World Math: Occupations, Education, and Income
- Real-World Math: Paying for College
- Real-World Math: Credit Reports
Frequently Asked Questions
How long does it take to prepare for the GED Math test?
It depends on where you’re starting from. Students who have most of the basics down and just need a polish often feel ready after 4–6 weeks of focused study. If you’ve been away from math for a while, plan on 2–4 months of consistent work — about an hour a day, four to five days a week. The fastest gains tend to come from working through topic lessons in order, then taking a full-length practice test every Sunday to see what’s still rough.
What math topics are on the GED test?
The GED Mathematical Reasoning test covers four main areas: number operations and number sense (about 25%), algebra, functions, and patterns (about 30–35%), measurement and geometry (about 20–30%), and data analysis, statistics, and probability (about 20–30%). The “Number Sense” and “Algebra” sections together make up roughly half the test, so if your time is limited, those are the highest-leverage places to start.
Can I use a calculator on the GED Math test?
Yes — but only on the second part of the test. The first 5 questions are calculator-prohibited. After that, you’ll have access to the on-screen TI-30XS MultiView calculator (or a physical TI-30XS if you’re testing at home). It’s worth practicing with that exact model before test day so you’re not fumbling for the square-root key during a timed question. See our TI-30XS guide for a walkthrough.
What’s a passing score on the GED Math test?
You need a 145 to pass. A score of 165–174 earns “GED College Ready,” and 175+ earns “GED College Ready + Credit.” For most students, aiming for 150 is a reasonable first goal — once you can hit it consistently on practice tests, your real-test score is usually right there.
Are these GED Math lessons really free?
Yes. Every lesson linked above — every topic, every worksheet, every practice test — is free to use as long as you’d like. If a particular topic clicks better in book form, the prep books shown on this page are the ones our students reach for the most.
The Most Comprehensive GED Math Preparation Bundle
If you want everything in one shot — full study guide, workbook, formula reference, and multiple practice tests — the bundle below is the deepest single resource we offer for the GED Math test.
Have any questions about the GED Test?
Drop your question in the comments below — about a specific topic, the test format, study planning, anything — and we’ll reply. You can also tell us what’s giving you trouble so we know what to add to the lessons next.
More from Effortless Math for the GED Test …
Need more guide on how to answer specific GED Math questions?
Check out our GED Math Test-Taking Strategies to learn the tips and methods that move your score the most for the least effort.
Looking for a practice test to measure your readiness?
Try our Full-Length GED Math Practice Test and Free GED Math Practice Test. Sitting through a real-format test is the fastest way to learn how the GED actually feels under timed conditions.
Need more GED Math practice?
Use the free GED Math Worksheet Generator to make a fresh one-skill worksheet with answers and step-by-step explanations. It is a good next step after a lesson, a formula review, or a missed practice-test question.

Related to This Article
More math articles
- Volume of Pyramids: Complete Guide with Video and Examples
- Free Grade 6 English Worksheets for California Students
- How to Complete the Table of Division Big Numbers By One-digit Numbers
- How to Find Inverse of a Function? (+FREE Worksheet!)
- Regions, Borders, and Geographic Tools
- Full-Length 7th Grade SBAC Math Practice Test-Answers and Explanations
- Top 5 Free Websites for Pre-Algebra Preparation
- Reciprocals
- How to Solve Zero and Negative Exponents? (+FREE Worksheet!)
- How is the ASTB Test Scored?




What people say about "The Ultimate GED Math Course [Updated for 2026] - Effortless Math"?
No one replied yet.